
Referencia inercial AHRS con GPS
Referencia inercial AHRS con GPS para posición y orientación con valores de velocidad de giro, aceleración, velocidad, pitch, roll y yaw. Salida digital.
Portada » Catálogo » SENSORES Y TRANSDUCTORES » Giróscopos y referencias inerciales » Referencias inerciales - IMUs - AHRS
Las Referencias inerciales – IMUs – AHRS del inglés Inertial Measurement Unit y AHRS del inglés Attitude and Heading Reference Systems son dispositivos para la medida de parámetros dinámicos como son la velocidad de giro, la aceleración o el posicionamiento tridimensional.
Esto se consigue gracias a sus sensores internos, con al menos tres acelerómetros y tres giróscopos, aunque opcionalmente también se puede contar con tres magnetómetros e incluso GPS.
Estas unidades son ampliamente utilizadas para la estabilización de cámaras, UGV y UAV, submarinos, etc. también en el estudio de movimiento de boyas marinas, veleros, robots… y en general en cualquier estudio que requiere análisis en entornos dinámicos o movimientos en tres dimensiones.
En Sensing contamos con diferentes Referencias inerciales – IMUs – AHRS en diferentes tecnologías, MEMS, capacitivos, fibra óptica…
También podemos ofrecer equipos de adquisición de datos donde integrar las diferentes señales procedentes de los sensores internos de las referencias inerciales – IMUs – AHRS, junto con otros sensores externos a ellas.
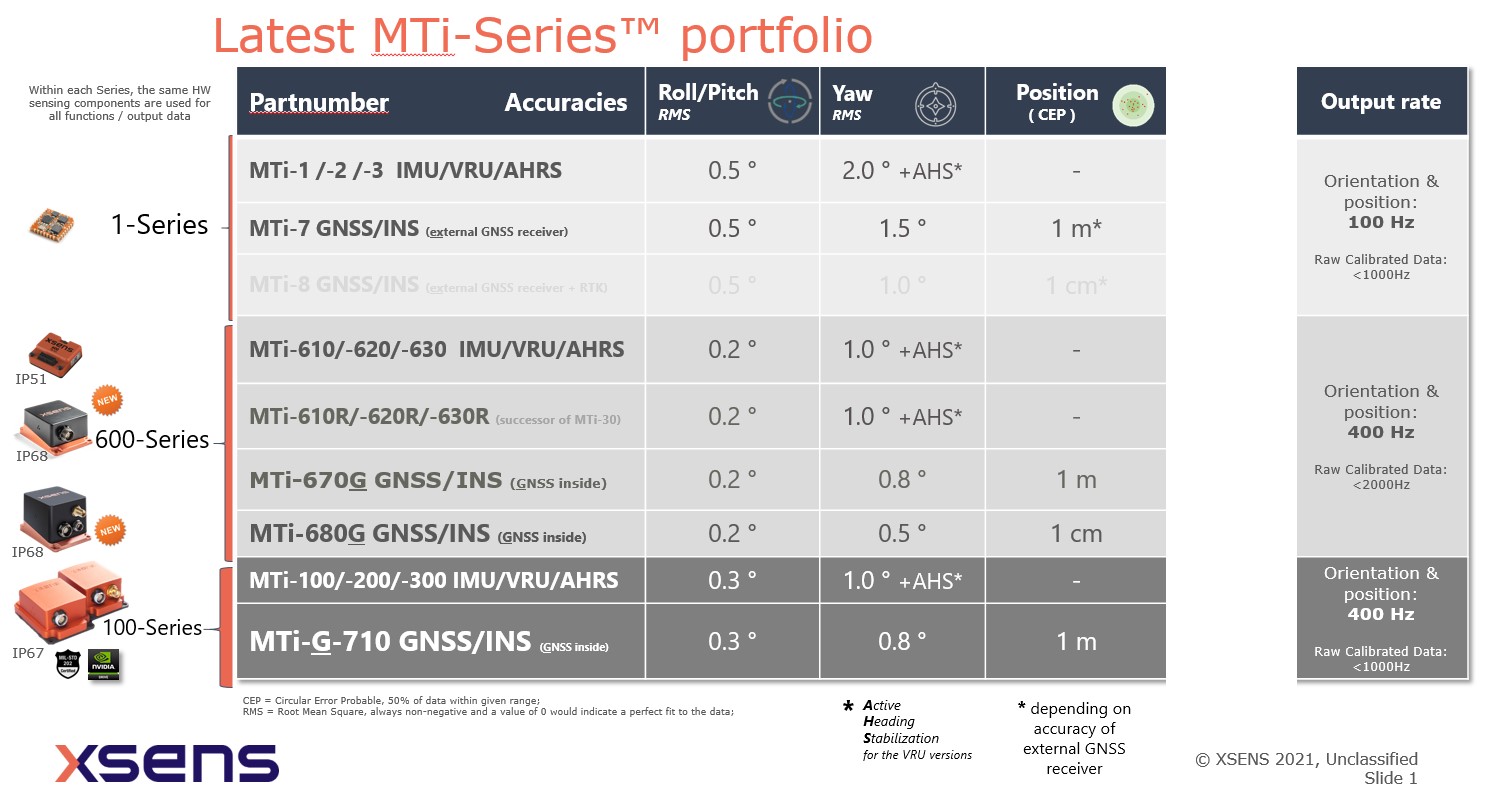
A continuación se muestra una tabla rápida de selección que comprende de un vistazo, toda la gama de productos de XSENS.
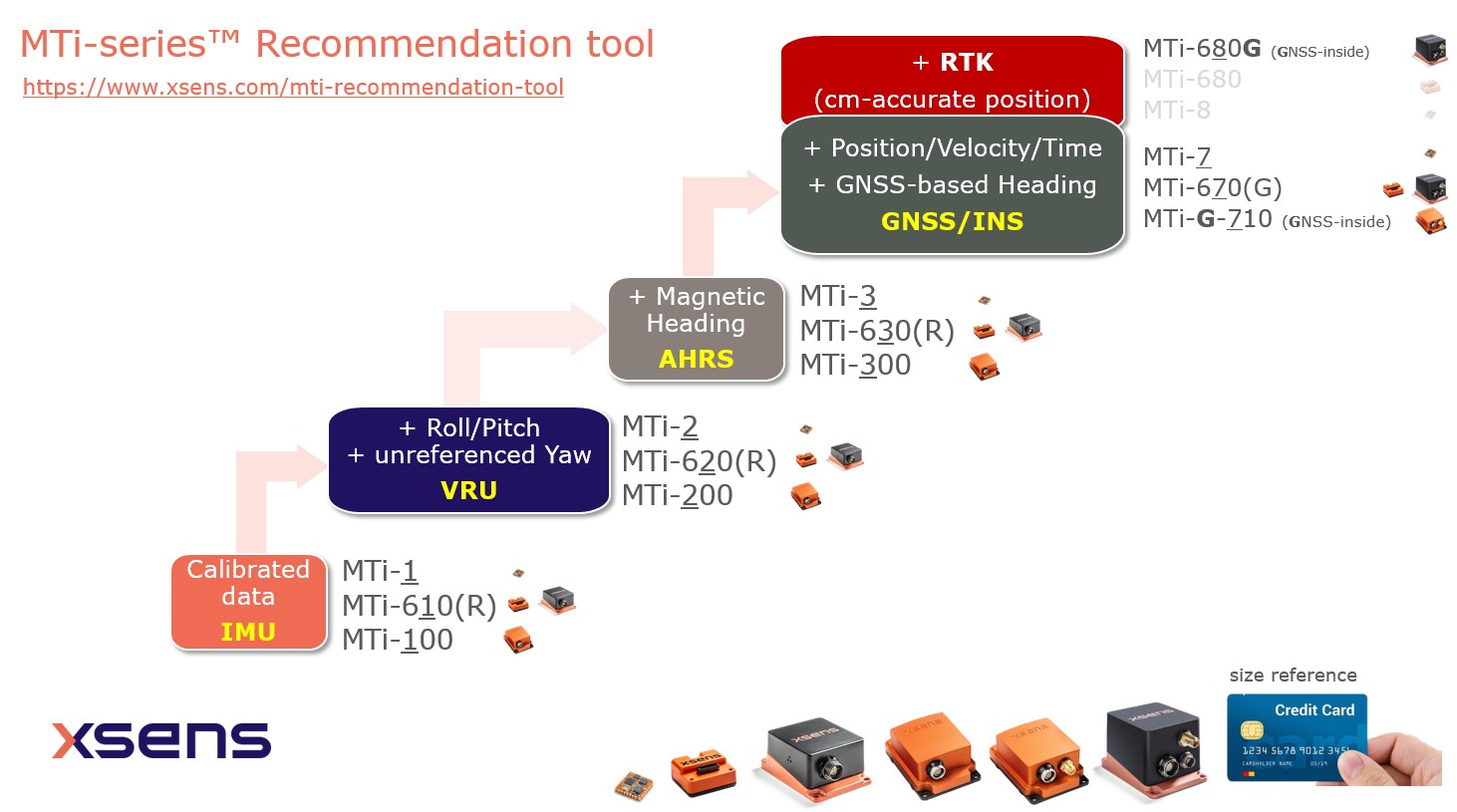
Los códigos de selección serían los siguientes:
1. La IMU (representada por el número ‘1’, es decir, MTi-1, -610, -10 y -100 respectivamente) es una Unidad de Medición Inercial 3D, que procesa la aceleración triaxial sincronizada, junto con la velocidad de giro triaxial y los datos del campo magnético terrestre en 3D también., así como la orientación y los incrementos de velocidad: dq y dv.
2. VRU (‘2’, es decir, MTi-2, -620, -20 y -200) es una Unidad de Referencia Vertical 3D, que calcula en tiempo real el balanceo ROLL, el cabeceo PITCH SIN DERIVA, y dirección (HEADING o YAW) no referenciada, además de todos los datos de la IMU.
3. AHRS («3», es decir, MTi-3, -630 (R), -30 y -300) es un Sistema de Referencia de Actitud y Rumbo 3D. Calcula balanceo, cabeceo y dirección con referencia al norte verdadero / magnético sin deriva, además de todos los datos de la IMU.
4. GNSS / INS (‘7’, es decir, MTi-7, -670, -670G (próximamente) y -G-710) es un sistema de navegación inercial asistido por GNSS de alto rendimiento para operación en exteriores. Los módulos con «G» en el número de pieza incluyen un receptor GNSS integrado (GPS, GLONASS, BeiDou, Galileo y QZSS) para una orientación 3D mejorada con GNSS. La adición de un receptor GNSS mejora significativamente las estimaciones de orientación a velocidades más altas. Viceversa, el uso de sensores inerciales aumenta significativamente la confiabilidad y la tasa de salida de los datos de posición GNSS, especialmente en entornos sin GNSS. Todos los datos de salida (orientación, posición, velocidad y datos de inercia) llevan una marca de tiempo UTC precisa.
5. GNSS / INS + RTK («8», es decir, MTi-680G) es un posicionamiento de alta precisión. RTK (cinemática en tiempo real) es una extensión de las señales de posicionamiento por satélite convencionales y reduce el error de posicionamiento máximo de alrededor de 1 ma 2 cm. El MTi-680G, un módulo GNSS / INS integrado, cuenta con un receptor RTK GNSS integrado, además de proporcionar orientación / actitud 3D sincronizada (inclinación, inclinación) y salidas de rumbo.
Mostrando los 4 resultadosOrdenado por los últimos
Referencia inercial AHRS con GPS para posición y orientación con valores de velocidad de giro, aceleración, velocidad, pitch, roll y yaw. Salida digital.

Referencia inercial AHRS para la navegación inercial con valores de velocidad de giro, aceleración, pitch, roll y yaw. Con diferente tipo de salida digital.

Referencia inercial VRU para la medida de giro y aceleración, con cálculo de pitch y roll. Salida digital.
Referencia inercial IMU para la medida de velocidad de giro y aceleración, con diferentes tipos de salidas digitales.
Este sitio web utiliza cookies para que usted tenga la mejor experiencia de usuario. Si continúa navegando está dando su consentimiento para la aceptación de las mencionadas cookies y la aceptación de nuestra política de cookies
ACEPTAR